在目前为止的科研和学习经历中,cuda
的使用已经成为了日程的一个通电和要点问题。这里总结一些我用过的优化方法,留作笔记。
GPU 八门神器
1 人多力量大
这是一个“不算优化的优化”,如何在 cuda 中调用多张卡进行计算。
首先一个不是办法的办法: 使用 MPI
进行第一层级并行,通信到不同的机器上,在每一个机器上使用一张卡。(好吧我编不下去了,这个方法蠢了,单机多卡完全摆烂了)
(不过本优化还有一个明显的特性:依赖内存带宽,这个是 PCIE4.0
机器目前的瓶颈之一,NVLink
某种意义上可以有效处理这一矛盾,但是他也只是一种瓶颈转移——把瓶颈转移到我们的经费上)
使用的时候和大部分的方法是相同的,但是不同之处是我们需要使用
cudaSetDevice 去手动设置使用的设备编号。参考 cudatest-18。
但是由于鲁棒性的需求,我们的 cudaSetDevice
在下标超出范围的时候还是可以正常使用的,一般编号超过范围的卡,我们会把卡的计算信息映射到最后一张卡上面。但是会返回
cudaError 的 bool 数值,详情参考 cudaSetDevice 的 API 手册。
下面是使用 cudatest19 把 8 个 1080 都用满的例子。
2 fast math & 精度
如果程序中的数学函数:三角函数、快速傅立叶变换、幂次、根号,等等。这些使用频率过高的时候,我们在
cuda 中可以从用 fast math 编译选项进行优化。一般会有
5~15%的效率提升。
nvcc -h 中可以读取 --use_fast_math 的具体内容和功能
3 wrap divergence
之前说过:
现在的 GPU 架构中 - 一个 GPU = 多个 Streaming Multiprocessor (SM) +
cache 组成 - 一个 SM = Streaming Processor(SP)+ cache 组成 - SM
用于处理 block - SP 用于处理 thread
但是我们调度的时候不会精细调度每一个 thread, 我们会用 wrap(1 wrap =
32 threads)去考虑这个事情。 所以如果出现分支的时候我们会发生所谓的 wrap
divergence。(这个概念最早出现在 Cray 机器的 PDE 求解上,我以前一直以为
GPU 也会做分支预测,直到事情变得不太健康我才发现这个会消耗很多性能)
这里参考一个例子 20-wrapdivergence
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 std ::chrono::duration_cast;std ::chrono::milliseconds;std ::chrono::seconds;std ::chrono::system_clock;class Func >void kernel (int n, Func func) {for (int i = blockDim.x * blockIdx.x + threadIdx.x;class Func1 , class Func2 >void kernel_split (int n, Func1 func1, Func2 func2) {if (threadIdx.x & 2 == 1 ) {for (int i = blockDim.x * blockIdx.x + threadIdx.x; i < n; i += blockDim.x * gridDim.x) {else {for (int i = blockDim.x * blockIdx.x + threadIdx.x; i < n; i += blockDim.x * gridDim.x) {class Func1 , class Func2 >void kernel_better (int n, Func1 func1, Func2 func2) {for (int i = 0 ; i < n; i += 2 ) {for (int i = 1 ; i < n; i += 2 ) {int main () {int n = 1 << 26 ;int block_dim = 128 ;int grid_dim = (n - 1 ) / block_dim;auto begin_millis = duration_cast<milliseconds>(system_clock::now().time_since_epoch()).count();float > x_host (n) ;float > y_host (n) ;return std ::rand() / 3.0 ;});return std ::rand() / 11.0 ;});float > x_dev (n) ;float > y_dev (n) ;int index){if (index % 2 == 1 )else auto end_millis = duration_cast<milliseconds>(system_clock::now().time_since_epoch()).count();printf ("%ld\n" , end_millis - begin_millis);return std ::rand() / 3.0 ;});return std ::rand() / 11.0 ;});int index) {int index) {printf ("%ld\n" ,end_millis - begin_millis);return std ::rand() / 3.0 ;});return std ::rand() / 11.0 ;});int index) {int index) {printf ("%ld\n" ,end_millis - begin_millis);return 0 ;
这个例子有 3 个函数,第一个是没有考虑分支分离的写法,kernel
函数每一次函数都有大量的分支。
第二个例子是考虑了分支,我们将分支提取到函数体外层即可(这个例子奇偶数分离出来,但是一般的
x86 平台机器还是可以很好的分支预测的,但是 cuda
的分支预测不是那么强,这就是过于强大的 SIMD 的一种代价吧)
第三个例子是没有考虑数据局部性例子
在 n = 1 << 20 的时候,三个耗时是(毫秒):
在 n = 1 << 26 的时候,三个耗时是(毫秒):
1 2 3 2963
这里看到提前分支可以做出很多优化。
但是不能为了编程方便忽视空间局部性的问题。在第 8 点中会详细介绍 GPU
内存的问题。
4 register
spill & local memory usage & latency hiding
4.1 Cuda Memory Intro
Local Memory 这里的意思其实是指
memory where registers and other thread data is spilled
之所以这么设计和 GPU 的架构有关,以 Fermi 架构为例:
图中我们看到我们的 LMEM 指的是 “SMEM 用尽,或者说也就是 SM
资源用尽的时候,额外使用的内存”,充分利用 L1
的存储空间可以发挥最大性能,但是如果我们没有使用好,就会造成 L1 和 L2
通信,正如下面这个链接所示
https://stackoverflow.com/questions/23876594/cuda-local-memory-register-spilling-overhead
从 L2/DRAM 中取数据或者写数据的代价是非常昂贵的。
在 Maxwell 和之后的架构中 L1 和 SMEM 合并
这里官方说了一下 LMEM
的使用场景,如果线程的场景比较复杂,我们就需要进行 register spill
从而达到避免寄存器冲突的目的。具体的 spill 策略未知,官方文档中也只有
heuristics 一词。 但是这里也说明了 Spill
不是坏事,数组是通过 SM 的 Register 访问的,这个在上面 20-wrapdivergence
的例子里面有个很好的对比,我们用错了访存顺序,就会导致每一次访存都进行
register spill。
cuda
对数组的使用不是用寄存器的,这个细节问题在下面的这个问题旁敲侧击给了一个漂亮的答案:
https://stackoverflow.com/questions/12167926/forcing-cuda-to-use-register-for-a-variable
4.2 Programmers' Behaviors
上述的架构对于我们编程人员有这些指导意义:
在 SM 上的 TB 越多越好,让 Thread Block
不停的跑我们的利用率就会高,在一个 thread
进行等待内存换入换出的时候,GPU 有一个叫 latency hiding
的策略,从而将使用效率变高。但是如果 Thread Block 太多,我们每一个 SM
能分配的寄存器就会变少,所以就会发生 Register Spill, 使用更高级的 L1、L2
Cache 去代替 Registers。所以 TB 不能太多,需要减少 Register Spill
的次数。
简而言之:Thread Block 越多越好,Register
少一些(少一些换入换出)更好。
下面使用一个例子说明。
https://docs.nvidia.com/cuda/cuda-c-programming-guide/index.html#launch-bounds
基于 modernGPU 项目写了 launchbound mergesort 测试,在
21-目录里对不同的 launch bound 进行测试。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 using std::chrono::duration_cast;using std::chrono::milliseconds;using std::chrono::seconds;using std::chrono::system_clock;using namespace mgpu;int main (int argc, char ** argv) standard_context_t context;cudaDeviceSynchronize (); auto begin_millis = duration_cast <milliseconds>(system_clock::now ().time_since_epoch ()).count ();int count = 1000000 ;for (int it = 1 ; it <= 50 ; ++it) {mem_t <int > data = fill_random (0 , 100000 , count, false , context);mergesort (data.data (), count, less_t <int >(), context);int > ref = from_mem (data);sort (ref.begin (), ref.end ());int > sorted = from_mem (data);auto end_millis = duration_cast <milliseconds>(system_clock::now ().time_since_epoch ()).count ();cudaDeviceSynchronize ();printf ("%ld\n" , end_millis - begin_millis);cudaDeviceSynchronize (); duration_cast <milliseconds>(system_clock::now ().time_since_epoch ()).count ();1000000 ;for (int it = 1 ; it <= 50 ; ++it) {mem_t <int > data = fill_random (0 , 100000 , count, false , context);launchboundsort (data.data (), count, less_t <int >(), context);int > ref = from_mem (data);sort (ref.begin (), ref.end ());int > sorted = from_mem (data);duration_cast <milliseconds>(system_clock::now ().time_since_epoch ()).count ();cudaDeviceSynchronize ();printf ("%ld\n" , end_millis - begin_millis);return 0 ;
4.3 shared memory
这里其实是两个话题的合并,但是我们一般都会把他们一起使用:
循环分块 + 共享内存预取数据
这种在 Stencil Computing 中特别常见
我们这里举一个例子,2D Laplacian
离散算子,这个是一个非常常见的例子了,就是
那么我们如何用 cuda 实现呢? 这里我写几个版本,22 stencil
里程序作为对比。
首先无处理:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 std ::chrono::duration_cast;std ::chrono::milliseconds;std ::chrono::seconds;std ::chrono::system_clock;void stencil (int row_num, int col_num, int *arr_data, int *result) {auto index = blockIdx.x * blockDim.x + threadIdx.x;auto current_row = index / col_num;auto current_col = index % col_num;auto data0 = arr_data[index];auto data1 = arr_data[(current_row + row_num - 1 ) % row_num * col_num + current_col];auto data2 = arr_data[(current_row + 1 ) % row_num * col_num + current_col];auto data3 = arr_data[current_row * col_num + (current_col + col_num - 1 ) % col_num ];auto data4 = arr_data[current_row * col_num + (current_col + 1 ) % col_num];4 * data0;int main () {int row_num = 1 << 14 ;int col_num = 1 << 14 ;int *arr;int *result;sizeof (int ) * row_num * col_num);sizeof (int ) * row_num * col_num);for (int index = 0 ; index < row_num * col_num; ++index) {1024 - 512 ;auto begin_millis = duration_cast<milliseconds>(system_clock::now().time_since_epoch()).count();int total_numbers = row_num * col_num;int block_size = 1024 ;auto end_millis = duration_cast<milliseconds>(system_clock::now().time_since_epoch()).count();printf ("%ld\n" , end_millis - begin_millis);return 0 ;
之后加上分块,效果拔群
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 std ::chrono::duration_cast;std ::chrono::milliseconds;std ::chrono::seconds;std ::chrono::system_clock;void stencil (int row_num, int col_num, int *arr_data, int *result) {auto current_row = blockIdx.x * blockDim.x + threadIdx.x;auto current_col = blockIdx.y * blockDim.y + threadIdx.y;auto index = current_row * col_num + current_col;auto data0 = arr_data[index];auto data1 = arr_data[(current_row + row_num - 1 ) % row_num * col_num + current_col];auto data2 = arr_data[(current_row + 1 ) % row_num * col_num + current_col];auto data3 = arr_data[current_row * col_num + (current_col + col_num - 1 ) % col_num ];auto data4 = arr_data[current_row * col_num + (current_col + 1 ) % col_num];4 * data0;int main () {int row_num = 1 << 14 ;int col_num = 1 << 14 ;int *arr;int *result;sizeof (int ) * row_num * col_num);sizeof (int ) * row_num * col_num);for (int index = 0 ; index < row_num * col_num; ++index) {1024 - 512 ;auto begin_millis = duration_cast<milliseconds>(system_clock::now().time_since_epoch()).count();int total_numbers = row_num * col_num;int block_size = 1024 ;32 , col_num / 32 , 1 ), dim3(32 , 32 , 1 )>>>(row_num, col_num, arr, result);auto end_millis = duration_cast<milliseconds>(system_clock::now().time_since_epoch()).count();printf ("%ld\n" , end_millis - begin_millis);return 0 ;
最后加上共享内存数据预取,这个工作边际效益递减,作用有限
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 std ::chrono::duration_cast;std ::chrono::milliseconds;std ::chrono::seconds;std ::chrono::system_clock;void stencil (int row_num, int col_num, int *arr_data, int *result) {auto current_row = blockIdx.x * blockDim.x + threadIdx.x;auto current_col = blockIdx.y * blockDim.y + threadIdx.y;auto index = current_row * col_num + current_col;auto data0 = arr_data[index];auto data1 = arr_data[(current_row + row_num - 1 ) % row_num * col_num + current_col];auto data2 = arr_data[(current_row + 1 ) % row_num * col_num + current_col];auto data3 = arr_data[current_row * col_num + (current_col + col_num - 1 ) % col_num ];auto data4 = arr_data[current_row * col_num + (current_col + 1 ) % col_num];4 * data0;int main () {int row_num = 1 << 14 ;int col_num = 1 << 14 ;int *arr;int *result;sizeof (int ) * row_num * col_num);sizeof (int ) * row_num * col_num);for (int index = 0 ; index < row_num * col_num; ++index) {1024 - 512 ;auto begin_millis = duration_cast<milliseconds>(system_clock::now().time_since_epoch()).count();int total_numbers = row_num * col_num;int block_size = 1024 ;32 , col_num / 32 , 1 ), dim3(32 , 32 , 1 )>>>(row_num, col_num, arr, result);auto end_millis = duration_cast<milliseconds>(system_clock::now().time_since_epoch()).count();printf ("%ld\n" , end_millis - begin_millis);return 0 ;
5 unroll
循环展开,至于目的不做冗余介绍,这里直接展示一下 unroll 用法。 在 22
中第三个例子已经使用了,只需要
#pragma unroll 一句即可
6 zerocopy
一个非常简单易用的 trick
https://migocpp.wordpress.com/2018/06/08/cuda-memory-access-global-zero-copy-unified/
简而言之,在 host 使用命令:cudaHostRegisterMapped 之后用
cudaHostGetDevicePointer 进行映射 最后解除绑定 cudaHostUnregister
即,如果我们数据只会在 GPU 产生和使用,我们不需要来回进行拷贝。
例子如下 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 0 );0 );0 );
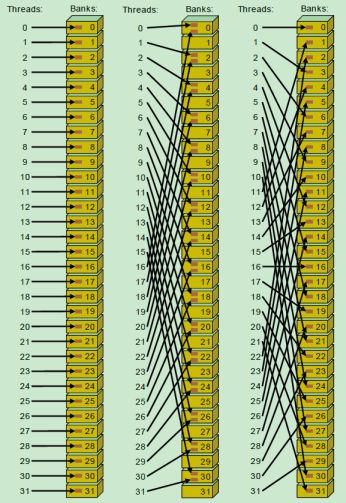
7 coalesced acccess
和 4.3
小节中的例子一样,但是那个例子因为边界情况,有一些复杂,这里补充说明一下
enter image description here
问题的出现在于我们取的数据不是连续数据。
在图。(a) n 个长度为 m 的向量以线性方式存储。向量 j 的元素 i 用 v j i
表示,GPU 内核中的每个线程都分配给一个 m 长的向量。CUDA
中的线程组成一个块数组,GPU 中的每个线程都有一个唯一的 id,可以定义为
indx = bd * bx + tx,其中 bd 表示块维度,bx 表示块索引,tx
表示每个块中的线程索引。
垂直箭头表示平行线程访问每个向量的第一个分量,这种情况下,内存访问不是连续的。通过对这些地址之间的间隔进行归零(如上图所示的红色箭头)
,内存访问就得到了合并。
8 bank conflict
https://blog.csdn.net/weixin_42730667/article/details/106171382
GPU 的共享内存,实际上是 32
块内存条通过并联组成的,每个时钟周期都可以读取一个 int。第 i
块内存,负责 addr % 32 == i
的数据。这样交错存储,可以保证随机访问时,访存能够尽量分摊到 32
个块。
如果在block内多个线程访问的地址落入到同一个bank内,那么就会访问同一个bank就会产生bank
conflict,这些访问将是变成串行,在实际开发调式中非常主要bank
conflict.
è¿éåå¾çæè¿°
处理方法非常简单,我们不要把 shared memory 开辟的空间设置成 32
的倍数即可(线性同余方程,原理也很好理解)
也可以采用一个 API 的办法:
使用 cudaDeviceGetSharedMemConfig 手动修改 GPU 的 shared memory
,少用一点,不过这个办法看起来不如上面的划算,其实性能差不太多。因为上面的办法实际上也会有空间浪费。
思考和小结
上述诸多技术都是不断学习总结的成果。我认为之后我们应该更多的关注日常软件的更新里的细节,其中
register spill 和 fast math 的问题其实是在 blender 的 issue
里面学习的,学习在于日常的积累和发现。
此外,我觉得用好 cuda 需要写更多的程序和例子。
下一步可以做的工作
自从 LLVM 中加入了 cuda codegen
之后,我觉得可以考虑加入一些基于编译器前端的自动化的工作。
例如能否测试一个任务的复杂程度,从而评估一个合适的 launch
bound。这个工作其实本来就应该交给编译器去完成,而不是让程序员自己数自己用的寄存器数目,自己考虑自己的
block 数目,这个怎么说都不太人性化。如果做的不好,可能会像 taichi
那样做成 flatten mode,会为了简化编程牺牲很多性能,做的过多可能会像 sycl
一样变得僵硬难用。这里能否建立一些合适的模型去评估可行性是一个值得思考的问题。
Reference
https://numba.readthedocs.io/en/stable/cuda/fastmath.html
https://docs.nvidia.com/cuda/cuda-math-api/group__CUDA__MATH__INTRINSIC__SINGLE.html
https://developer.download.nvidia.com/CUDA/training/register_spilling.pdf
https://stackoverflow.com/questions/12167926/forcing-cuda-to-use-register-for-a-variable
https://www.carlpearson.net/pdf/2016nuggets.pdf
https://stackoverflow.com/questions/21196685/function-as-argument-of-thrust-iterator-cuda
https://www.sciencedirect.com/science/article/abs/pii/S016781911300094X
https://www.nvidia.com/content/PDF/isc-2011/Brandvik.pdf
https://migocpp.wordpress.com/2018/06/08/cuda-memory-access-global-zero-copy-unified/
https://blog.csdn.net/weixin_42730667/article/details/106171382
https://www.microway.com/hpc-tech-tips/gpu-shared-memory-performance-optimization/
https://docs.nvidia.com/cuda/cuda-c-programming-guide/index.html